Robot Semi-Humanoid Beroda China Siap Beroperasi Di Bulan 2035
Teknologi
Robotika
14 Mar 2026
1259 dibaca
1 menit
TLDR
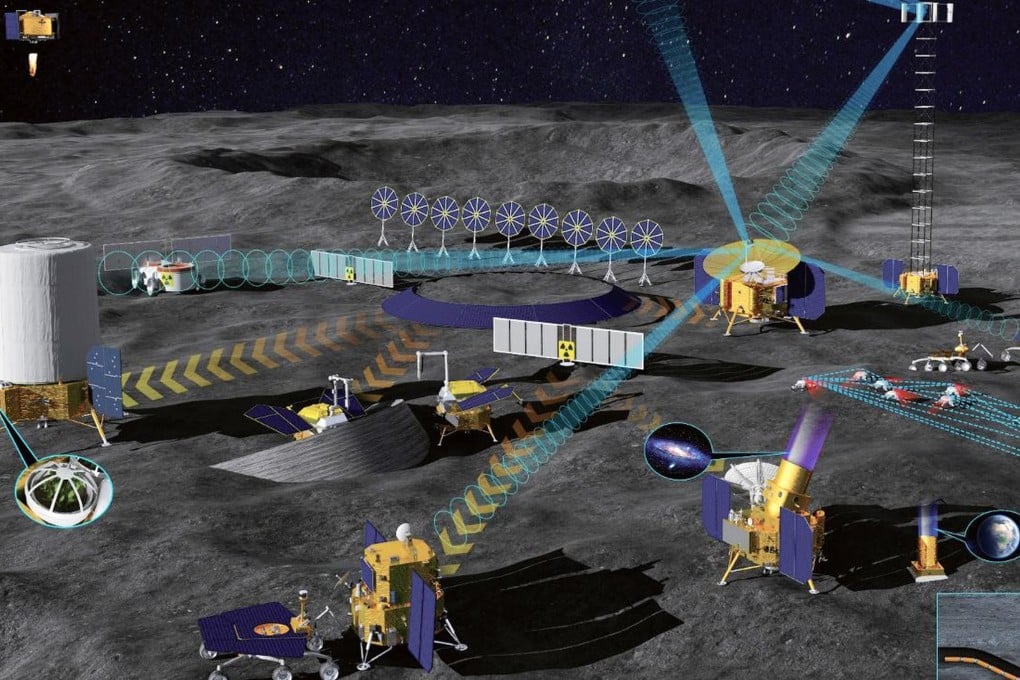
Robot semi-humanoid dirancang untuk meningkatkan efisiensi eksplorasi lunar.
Penggunaan platform roda memberikan stabilitas dan kecepatan yang lebih baik di permukaan bulan.
Robot ini dapat melakukan berbagai tugas mulai dari konstruksi hingga pengambilan sampel ilmiah.



